【ROS模块】关于autoware平台简述
Installation - Autoware Documentation
Architecture overview - Autoware Documentation
一、说明
Autoware 是世界领先的自动驾驶开源软件项目。 Autoware 基于机器人操作系统 (ROS) 构建,可在广泛的车辆和应用中实现自动驾驶的商业部署。
二、架构设计要旨
2.1 为什么要新结构
之前的系统没有具体的架构设计模块
● 大量技术短缺
○ 之间紧耦合模块
○ 责任不明确
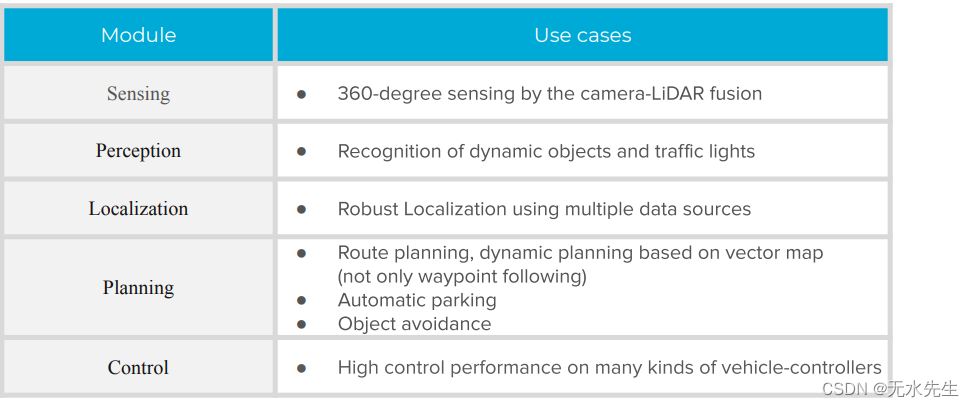
2.2 在架构设计期间考虑的实际示例
下表是自动驾驶需要考虑的问题。
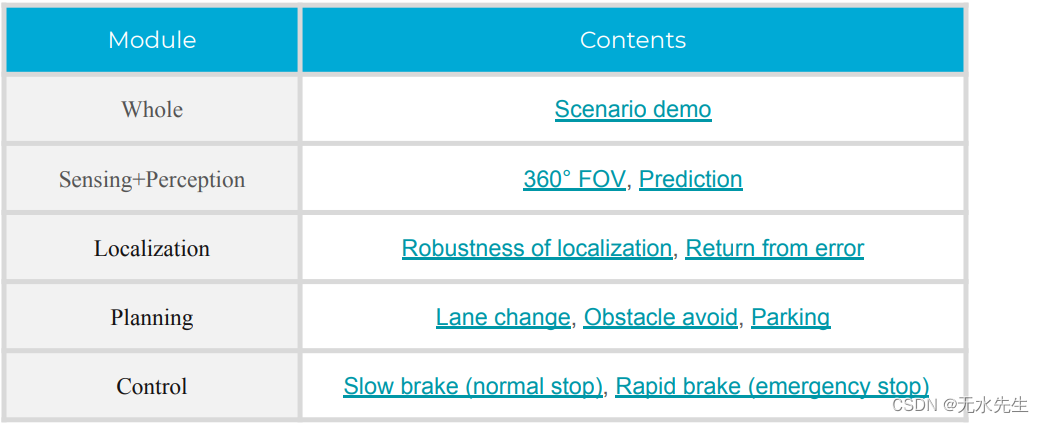
问题的相关解决路线:
2.3 还没有考虑的特性(为了开发速度)
● 实时处理
● HMI / 故障安全 / 冗余系统 / 状态监控系统等...
将在 AWF WG 中考虑这些项目
三、新设计的特点
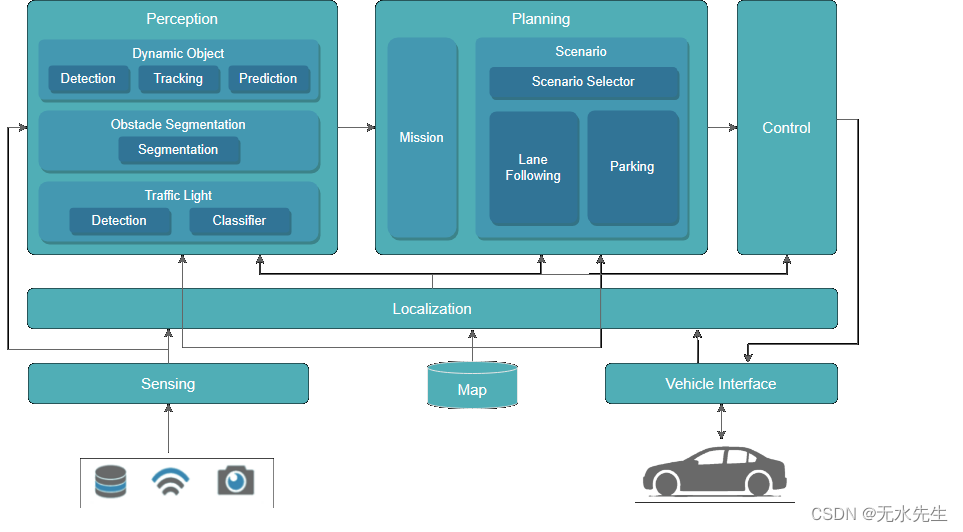
3.1 autoware设计概略
目前的Autoware定义为分层架构,明确了各个模块的作用,简化了它们之间的接口。通过这样做:
- Autoware 的内部处理变得更加透明。
- 由于模块之间的相互依赖性降低,协作开发变得更加容易。
- 用户可以通过简单地包装他们的软件以适应 Autoware 的界面,轻松地用他们自己的软件组件替换现有模块(例如本地化)。
请注意,此架构设计的最初重点仅在于驱动能力,因此以下功能留作未来工作:
- 故障安全
- 人机接口
- 实时处理
- 冗余系统
- 状态监控系统
 Autoware 的架构由以下六个堆栈组成。每个链接页面都包含一组更详细的要求和特定于该堆栈的用例:
Autoware 的架构由以下六个堆栈组成。每个链接页面都包含一组更详细的要求和特定于该堆栈的用例:
- Sensing design
- Map design
- Localization design
- Perception design
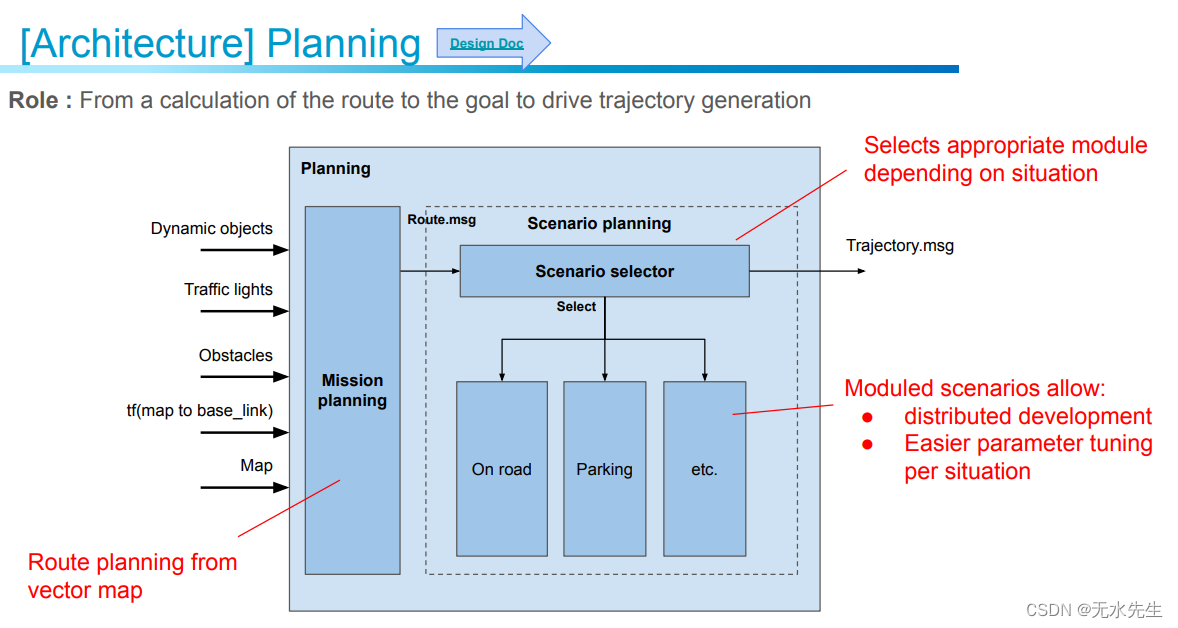
- Planning design
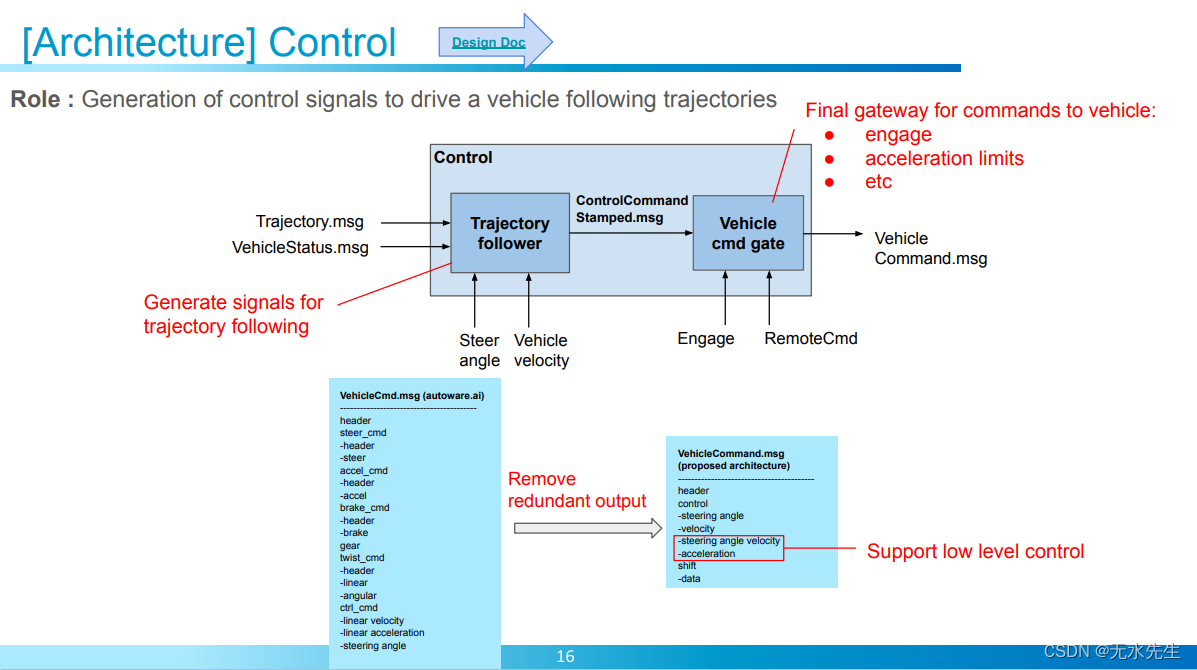
- Control design
- Vehicle Interface design
3.2 节点图
可以在节点图表页面上找到显示默认配置中 Autoware 节点的图表。 Autoware Universe 文档中提供了每个节点的详细文档。
请注意,Autoware 配置是可扩展的/可选择的,并且会根据环境和所需用例而有所不同。
四、下层设计概要图解
4.1 预测、计划、控制的流程图
预测、计划、控制的内部模块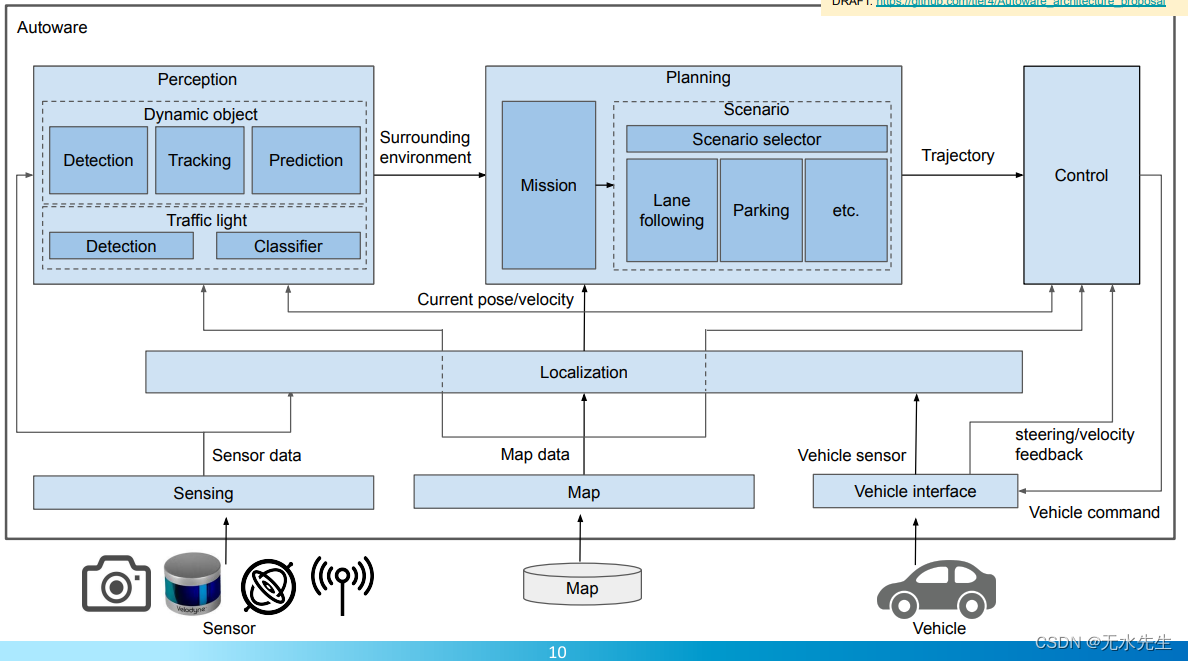
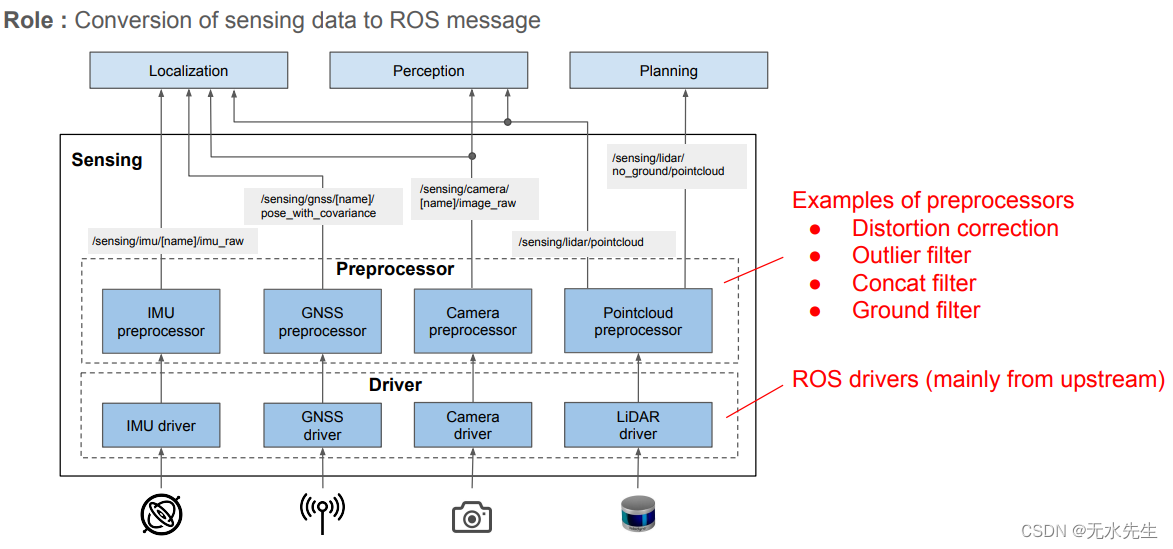
4.2 传感器数据转化成ros消息
4.3 地图信息读取和发布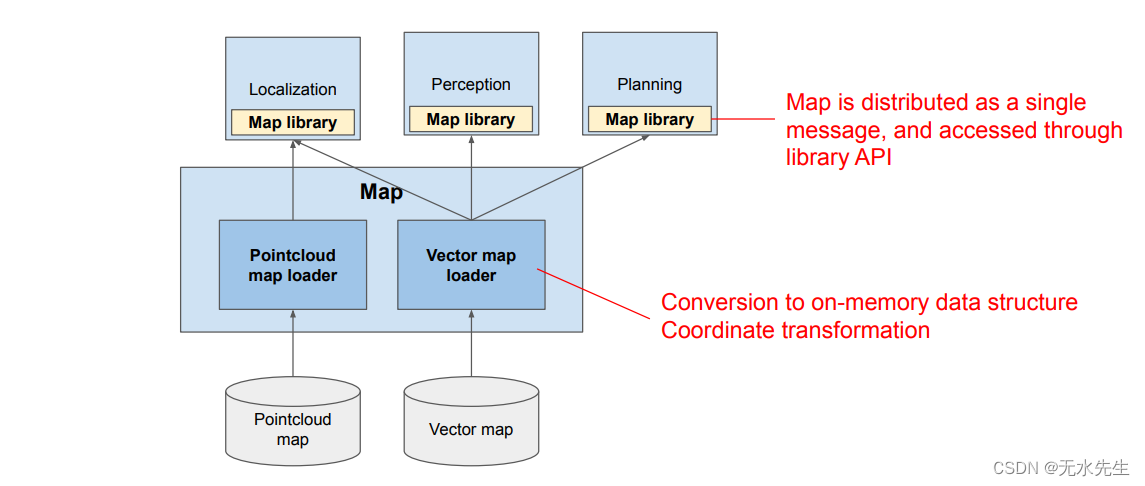
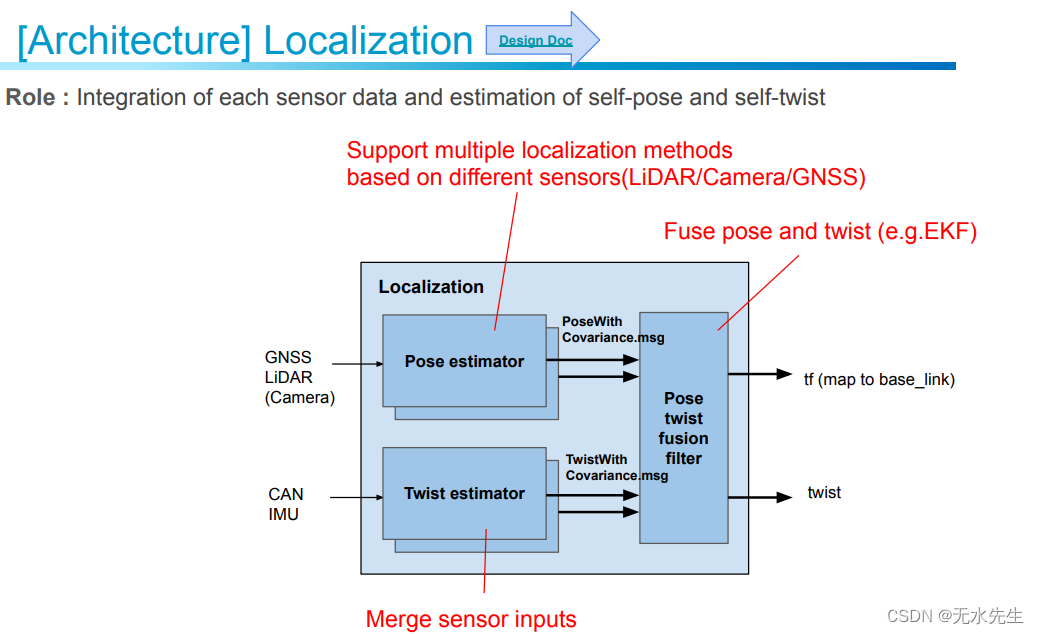
4.4 自估计位置系统
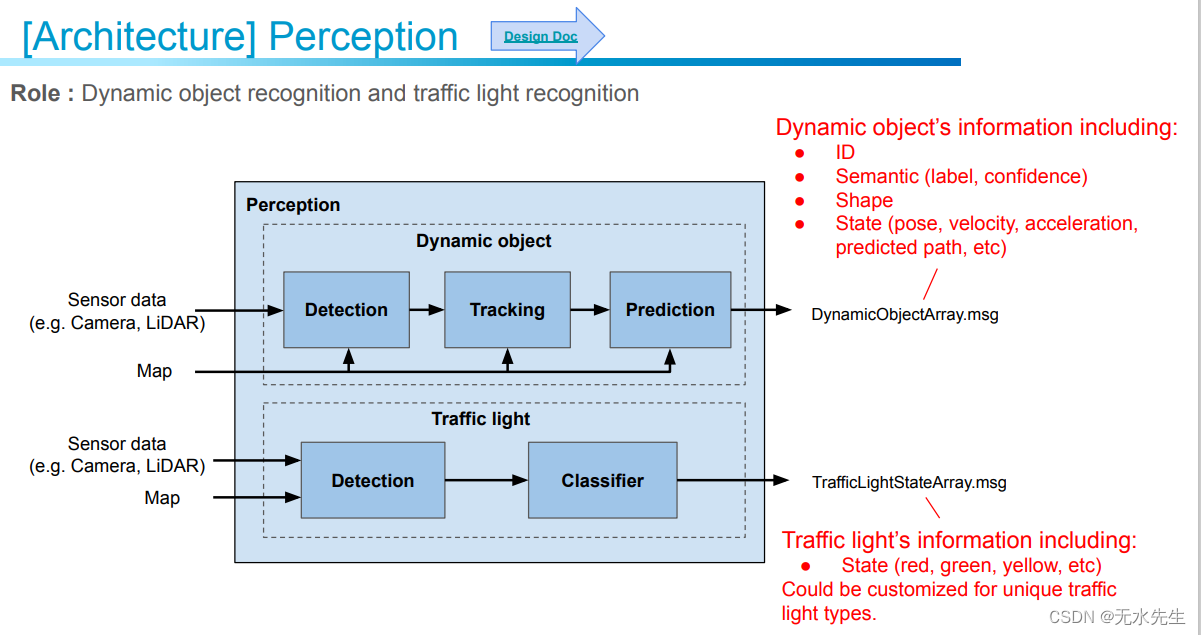
4.5 预测系统
4.6 决策系统
4.7 控制系统
4.8 关于动态对象
● 点云分割:将点云分割成对象簇
○ 通过算法改进变得更快(它可以在 CPU 上实时工作)
● 图像检测:检测图像上的对象作为 ROI
○ 通过 Tensor RT 和 int8 量化在 Jetson AGX 上实现 40FPS
● Fusion : 匹配Pointclouds Segmentation的结果和图像检测结果的ROI
○ 通过使用IoU提高匹配精度
● 形状估计:通过点云分割在几何上近似对象的整体大小
○ 每个对象类别的形状估计
○ 通过改变Bounding Box的拟合算法提高精度
● Multi-Object Tracking : 根据时间序列数据分配ID,估计速度和加速度,并去除异常值
○ 通过类标签更改跟踪模型来提高性能
○ 考虑类标签和大小的数据关联
● 基于地图的预测:利用地图中的车道信息预测物体的移动路径
○ 推断对象的行为意图并估计预测的移动路径的每个可靠性。
红绿灯
● 基于地图的检测:根据自身位置和地图数据提取摄像头图像中交通灯的 ROI
○ 考虑了自身位置、校准和硬件振动的误差
● 精细检测
○ 与学习者更精确地提取红绿灯的ROI
● 分类器:通过图像中的颜色信息识别交通灯的状态
○ 通过精细的噪声去除过程减少检测错误
后记
以上是对autoware的概略介绍,需要补充大量详细的资料。