基于层次分析法的轴间预瞄和轴距预瞄俯仰半车LQR控制仿真分析(重型汽车)
目录
前言
1. 半车悬架模型
2. LQR最优控制原理简述
3. 基于LQR的半车悬架轴间预瞄和轴距预瞄仿真分析
3.1仿真模型
3.2仿真结果
4.总结
前言
上篇文章简谈了轴距预瞄和轴间预瞄的原理以及仿真分析,可以发现对于轴间预瞄和轴距预瞄其控制效果相对于不带预瞄悬架性能有所提升,并且我们通过仿真分析得到轴间预瞄又由于轴距预瞄,本篇文章将应用LQR控制于半车悬架上,并且结合轴间预瞄和轴距预瞄又会擦出怎样的火花呢?让我们看下仿真分析便一目了然了。
上篇文章关于轴间预瞄和轴距预瞄的文章链接:
基于半车悬架的轴距预瞄与轴间预瞄仿真对比_Mr. 邹的博客-CSDN博客
1. 半车悬架模型
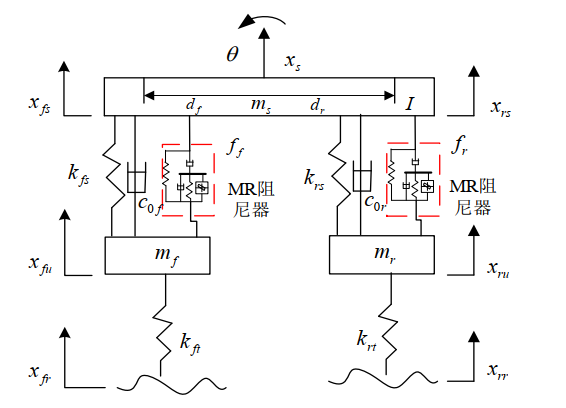
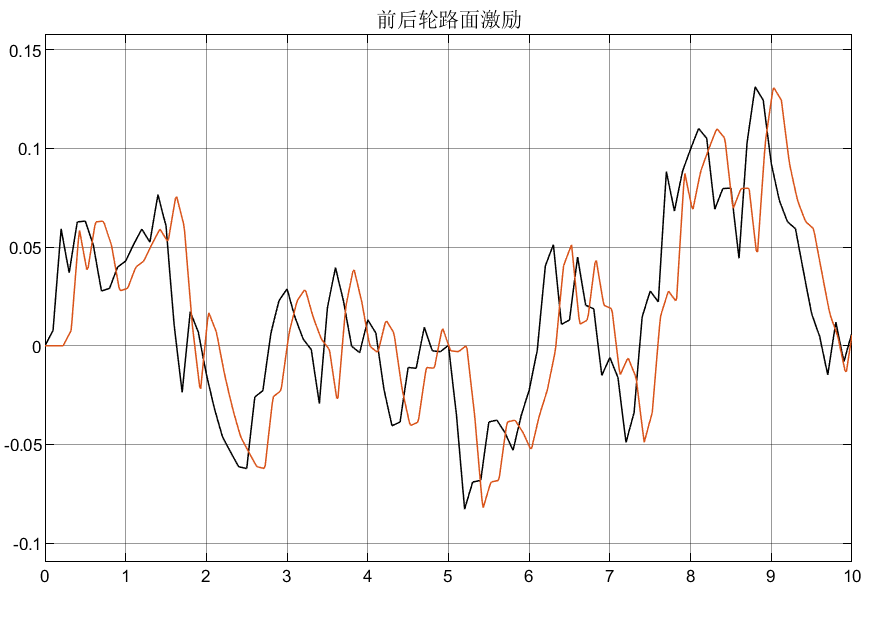
其中, ms、 xs、 xfs、 xrs 分别为簧载质量及其质心、 前端、后端的垂向位移; mf、 xfu 分别为前悬架非簧载质量及其垂向位移; mr、 xru 分别为后悬架非簧载质量及其垂向位移; θ为俯仰角, I 为转动惯量; kfs、 c0f 分别为前悬架的弹簧刚度和不可调阻尼系数; krs、 c0r 分别为后悬架的弹簧刚度和不可调阻尼系数; kft、 krt 分别为前、 后轮胎刚度; ff、 fr 分别为前、后悬架的可调阻尼力; xfr、 xrr 分别为前、 后轮路面激励; df、 dr 分别为前、 后轮到质心的距离。
假设俯仰角很小θ,车身的绝对位移和速度近似为:
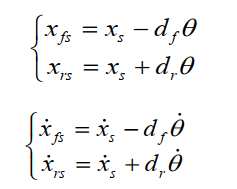
所以前后轮四自由度 1/2 车半主动悬架系统的动力学方程可表示为:

对于其它类型的悬架建模可了解往期链接:
半车(前后、左右)、整车悬架详细推导建模和simulink仿真分析_半车模型的最小实现_Mr. 邹的博客-CSDN博客
2. LQR最优控制原理简述
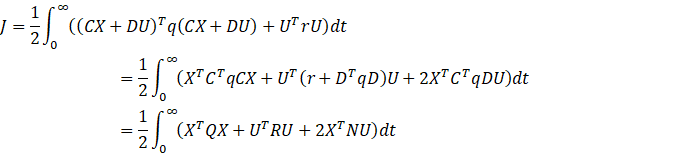
选择前车轮动变形、前悬动扰度、前车身加速度、后车轮动变形、后悬动扰度、后车身加速度作为性能指标的权系数为qi(i = 1,2,3,4,5,6),前后悬控制输入矩阵的权系数为r1、r2

将悬架数学模型代入J中,则有:

![]()

3. 基于LQR的半车悬架轴间预瞄和轴距预瞄仿真分析
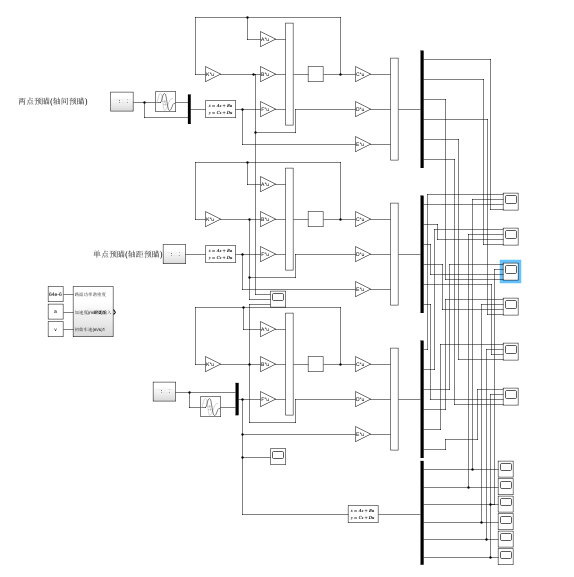
3.1仿真模型
3.2仿真结果
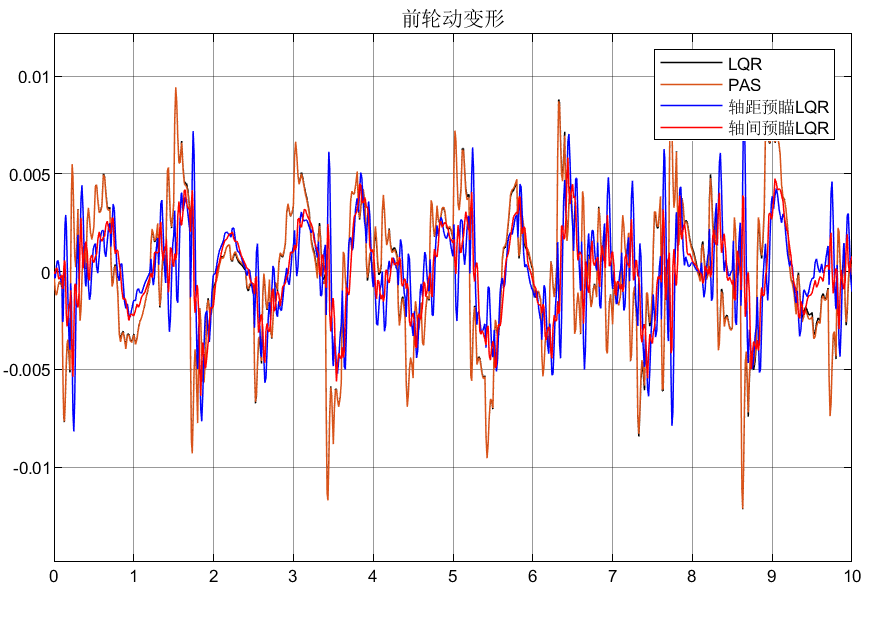
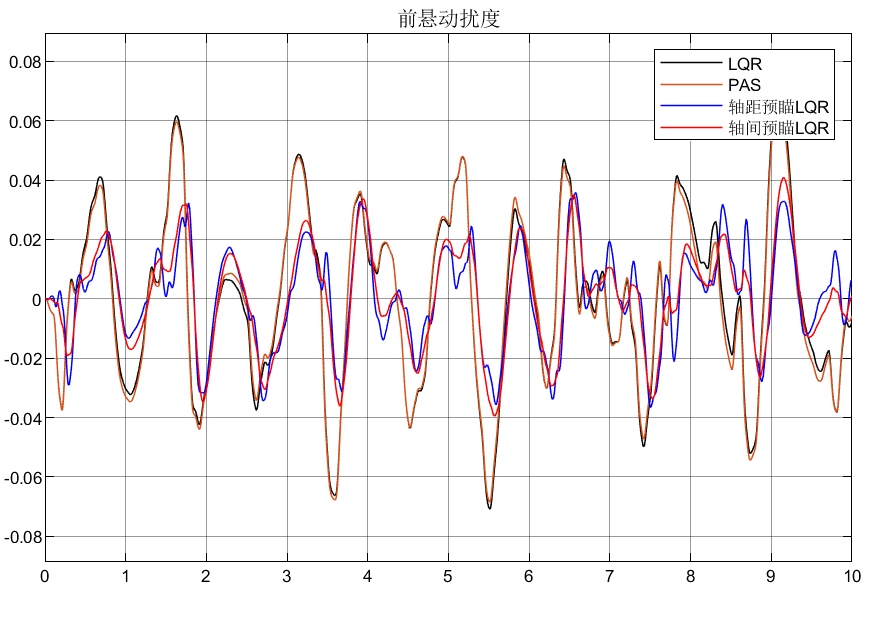
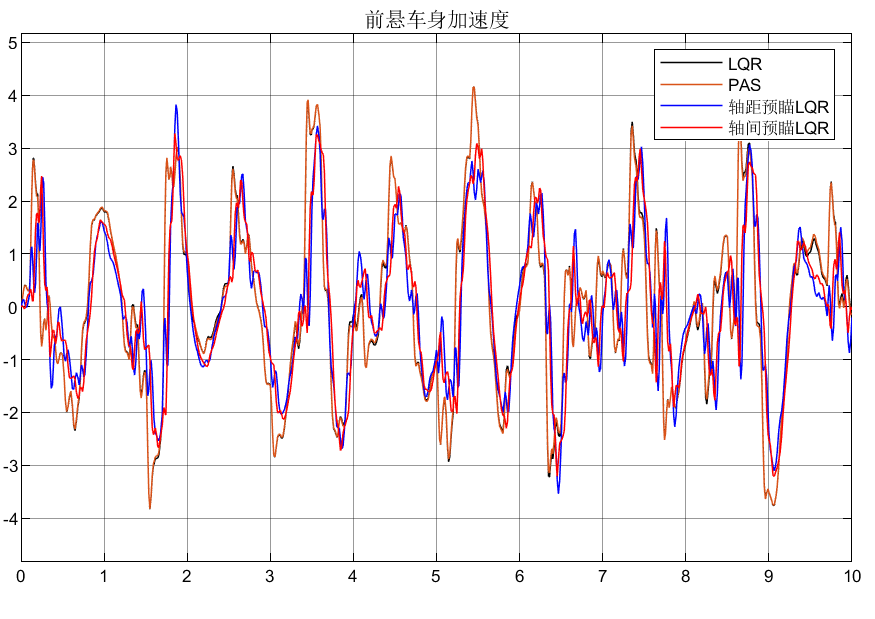
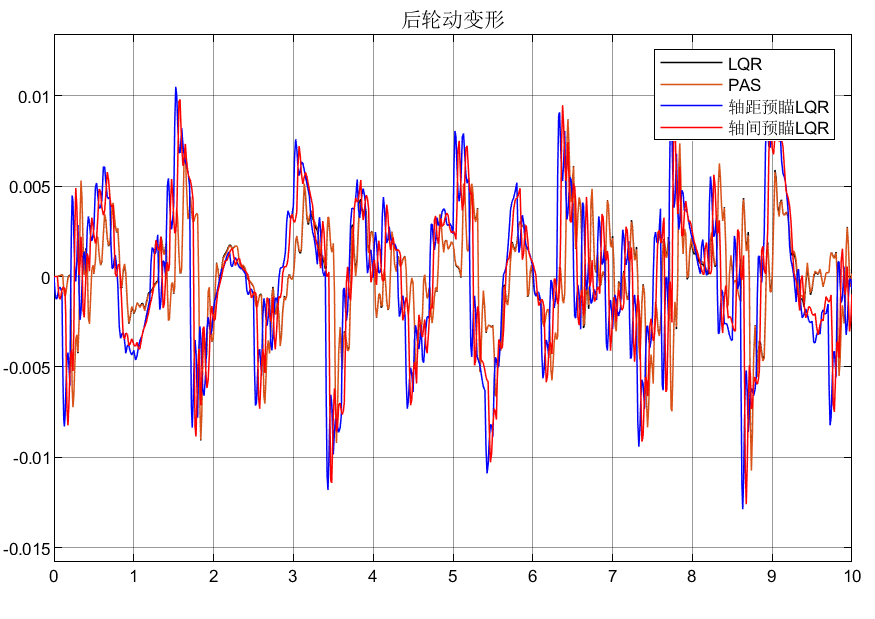
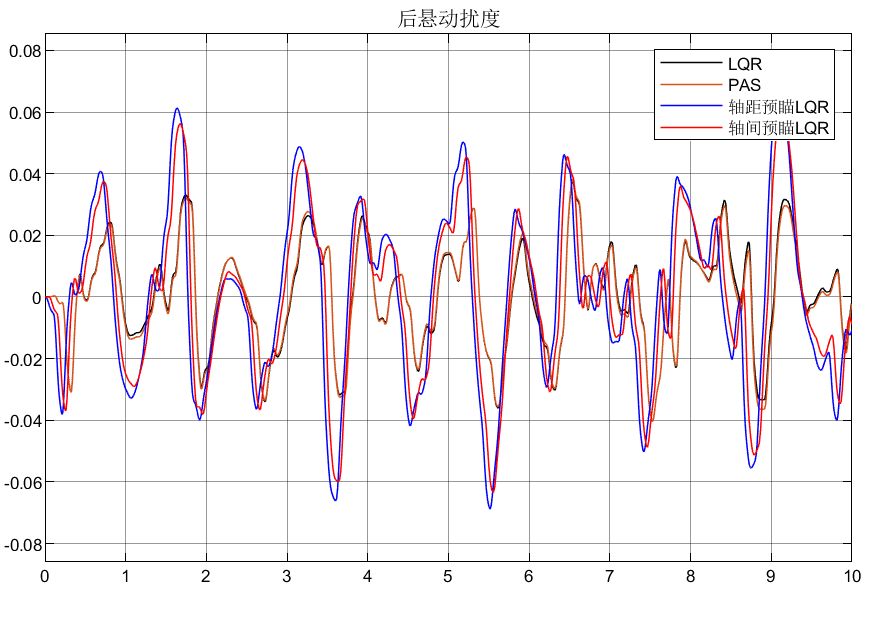
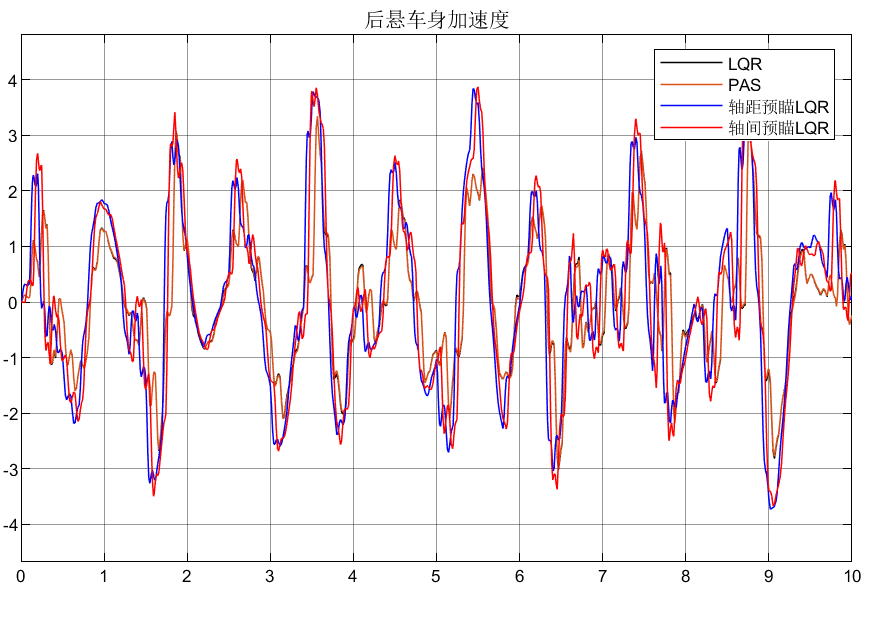
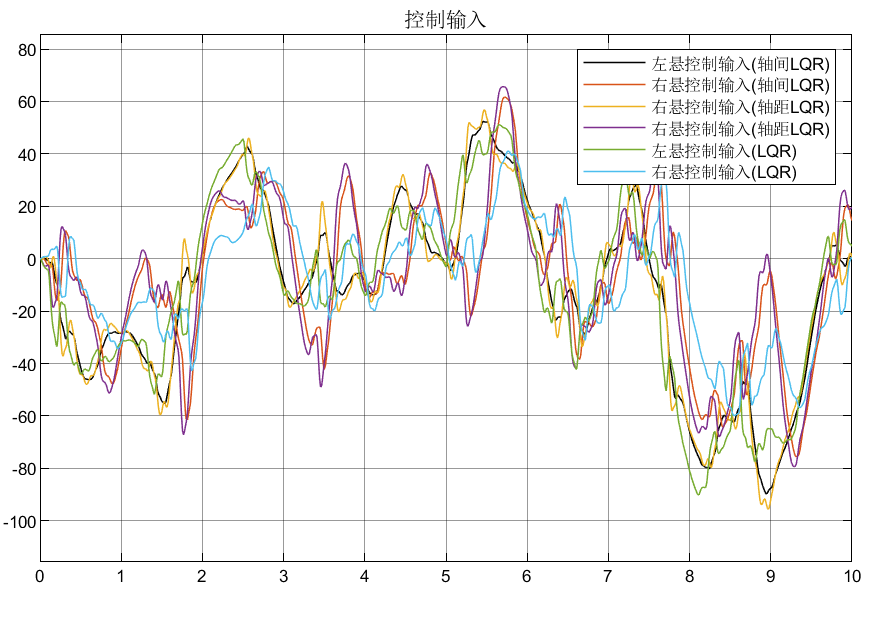
在B级随机路面,车速为70km/h工况下仿真结果如下:
4.总结
①可以看到后悬由于有预瞄,所以相对于前悬的性能指标有所改善;
②轴间预瞄由于可以调节权系数,所以相对于轴距预瞄表现更好;
③层次分析法还是存在主管因素,但是可以利用一些寻优算法进行权重调节,后续会调试整车LQR权重优化仿真分析;
④这里选取状态变量的时候没有涉及路面激励xr,这里其实存在一些问题,后续会更新包含xr的LQR权重调节仿真分析。
参考文献:
[1]悬架结构参数优化及基于卡尔曼滤波的主动悬架控制研究_李芳
[2]秦民,董波,马天飞,等. 基于轴间预瞄的主动悬架研究[J]. 汽车工程,2004,26(2):193-196. DOI:10.3321/j.issn:1000-680X.2004.02.019.
[3]李金辉,何杰,李旭宏. 基于轴距预瞄的重型汽车主动悬架道路友好性研究[J]. 公路交通科技,2013,30(11):152-158. DOI:10.3969/j.issn.1002-0268.2013.11.024.
[4]考虑路面预瞄信息和参数不确定性的空气悬架半主动控制
[5]潘公宇,陈立付,张庆庆. 七自由度模型下主动空气悬架最优控制研究[C]. //2010中国汽车工程学会年会论文集. 2010:1453-1458.
[6]杨广旭. 车辆半主动悬架最优控制方法研究[D]. 吉林:吉林大学,2022.
下一篇:网分线缆测试和dc-block