路径规划算法2 A*算法
迪丽瓦拉
2024-05-25 23:09:57
0次
本文参考:(44条消息) A*算法(超级详细讲解,附有举例的详细手写步骤)_Clark-dj的博客-CSDN博客_a*算法
(44条消息) 路径规划算法_于追梦丶的博客-CSDN博客_路径规划算法
A*算法基本概念
A*算法发表于1968年,A*算法是将Dijkstra算法与广度优先搜索算法(BFS)二者结合而成,通过借助启发式函数的作用,能够使该算法能够更快的找到最优路径。A*算法是静态路网中求解最短路径最有效的直接搜索方法,是最强大且最受欢迎的图搜索算法之一。
A算法的启发式函数:f(n)=g(n)+h(n)
- f(n)表示结点的综合优先级,在选择结点时考虑该结点的综合优先级;
- g(n)表示起始点到当前结点的代价值;
- h(n)表示当前结点到目标点的代价估计值,启发式函数。
当h(n)趋近于0时,此时算法退化为Dijkstra算法,路径一定能找到,但速度比较慢;当g(n)趋近于0时,算法退化为BFS算法,不能保证一定找到路径,但速度特别快。我们可以通过调节h(n)的大小来调整算法的精度与速度。
在A*算法中,采用最多的是欧几里得距离,即dist = srqt((y2-y1)2+(x2-x1)2)。
A*算法原理详细解释:

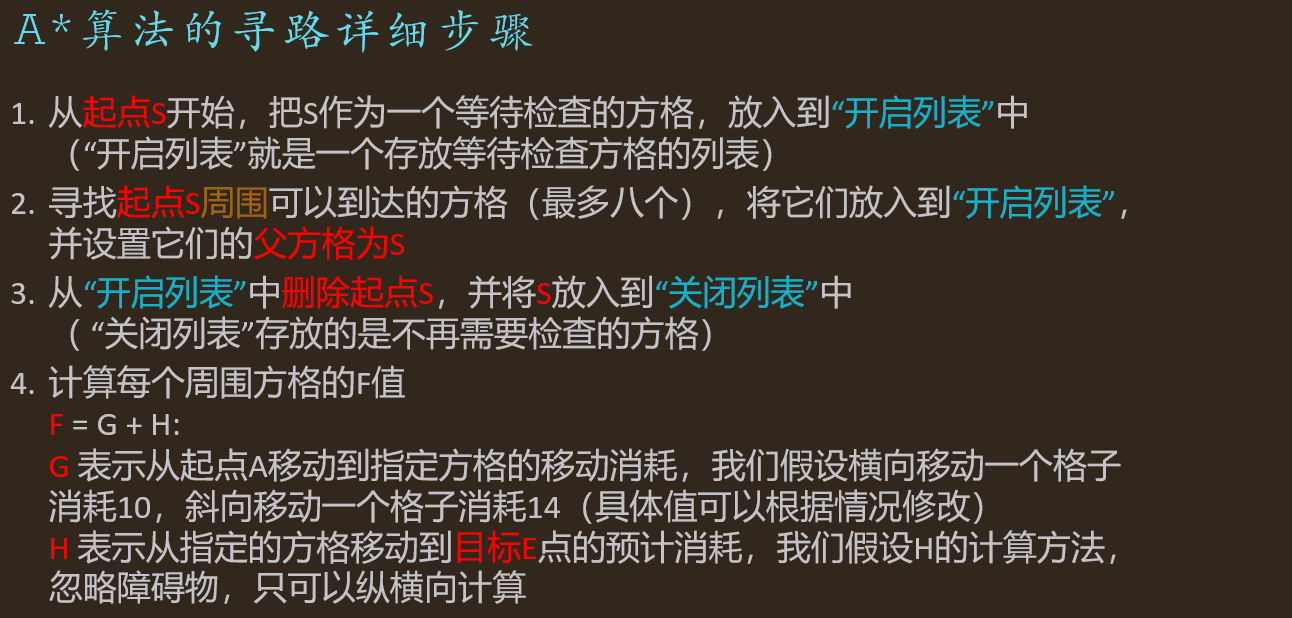
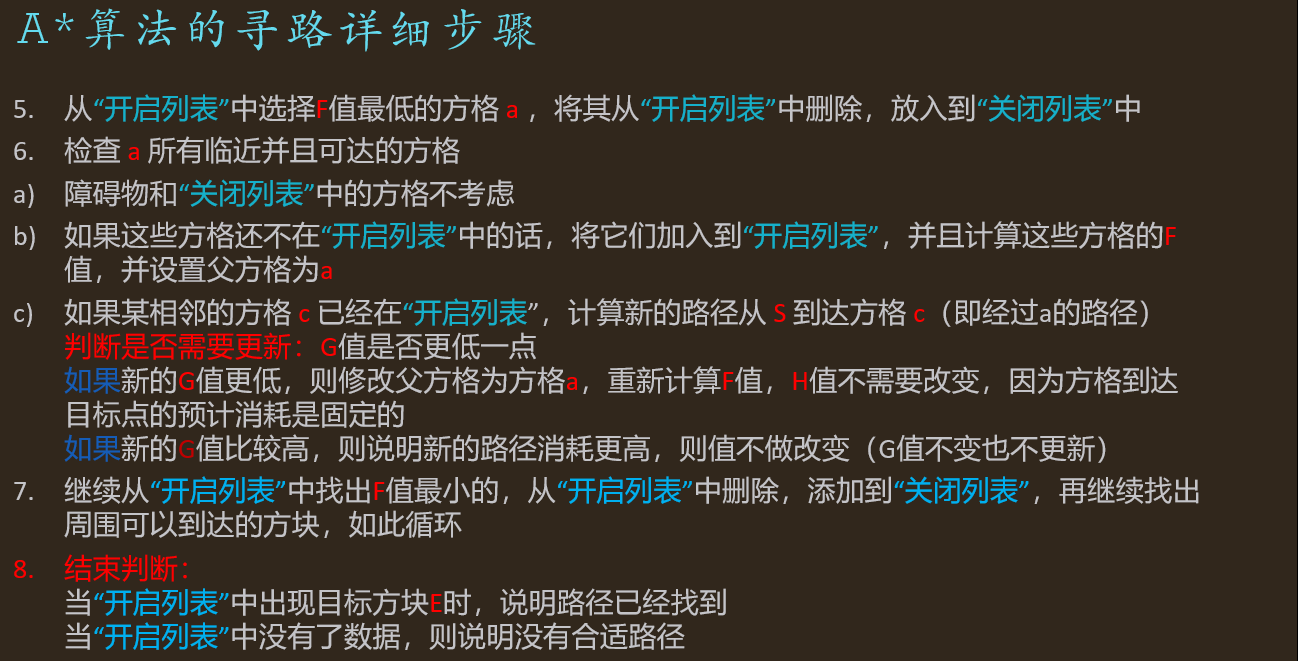
!!!重要:A*算法详细实现步骤

A*算法的寻路伪代码(C++)
//FindPath
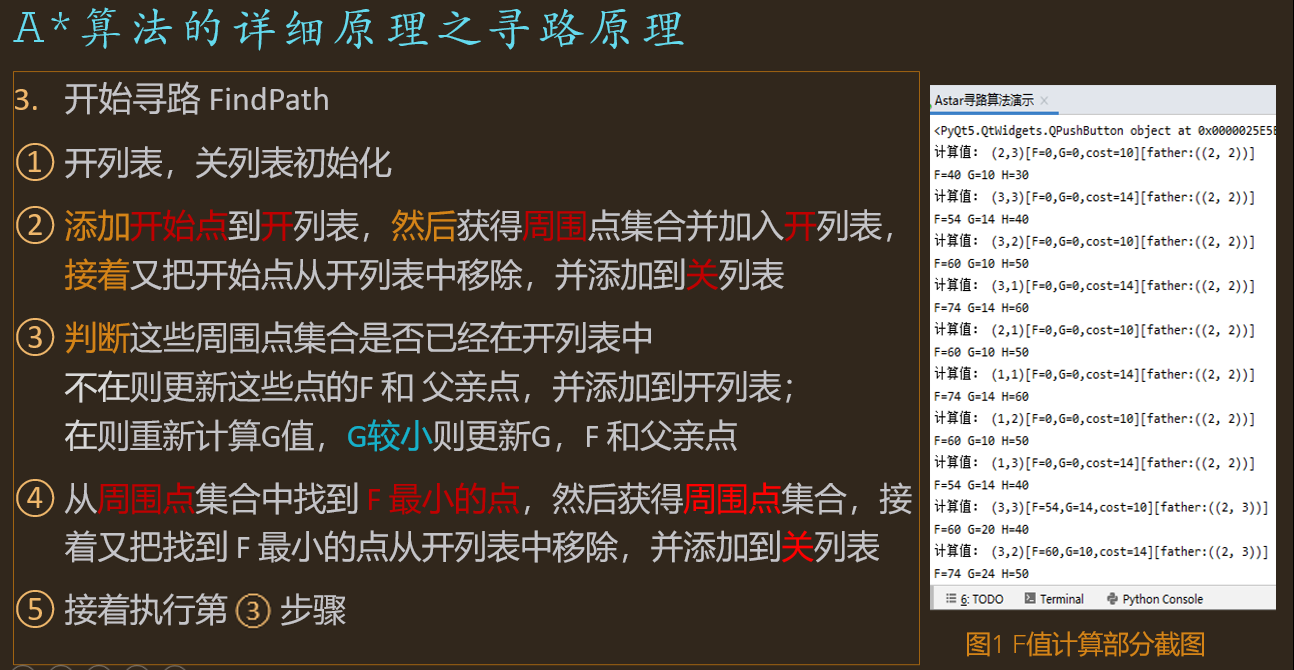
do{//确定中心搜索点,上一个中心点关闭,新的中心点开启 查找:Find the minimumm "point" of "F" from the "open_list" center;"now_point" = "min_point";//minimumm point "now_point"添加到"close_list";//新中心点的周围点开启,新中心点关闭 循环遍历:"now_point"相邻的周围8格"s_now_point"中的每一个;//这一块它指的就是now_point周围8点当前搜索点 s_now_point,为了简单直接用它表示 if (它不可通过||它已经在"close_list"中){什么也不做;} else if (它不在开启列表中){把它添加进"open_list";把"now_point"作为这它的"father",计算它的"F","G","H";}else if (它已经在开启列表中){//通过G来判断是否需要更新 if (new_G < old_G){更新它的"father"为当前中心搜索点"now_point";更新它的"G"与"F" ;} else{不更新,保持原来的"father", "G"与"F" ;} }
} while(目标格"end_point"已经在"open_list"||"open_list"==NULL)
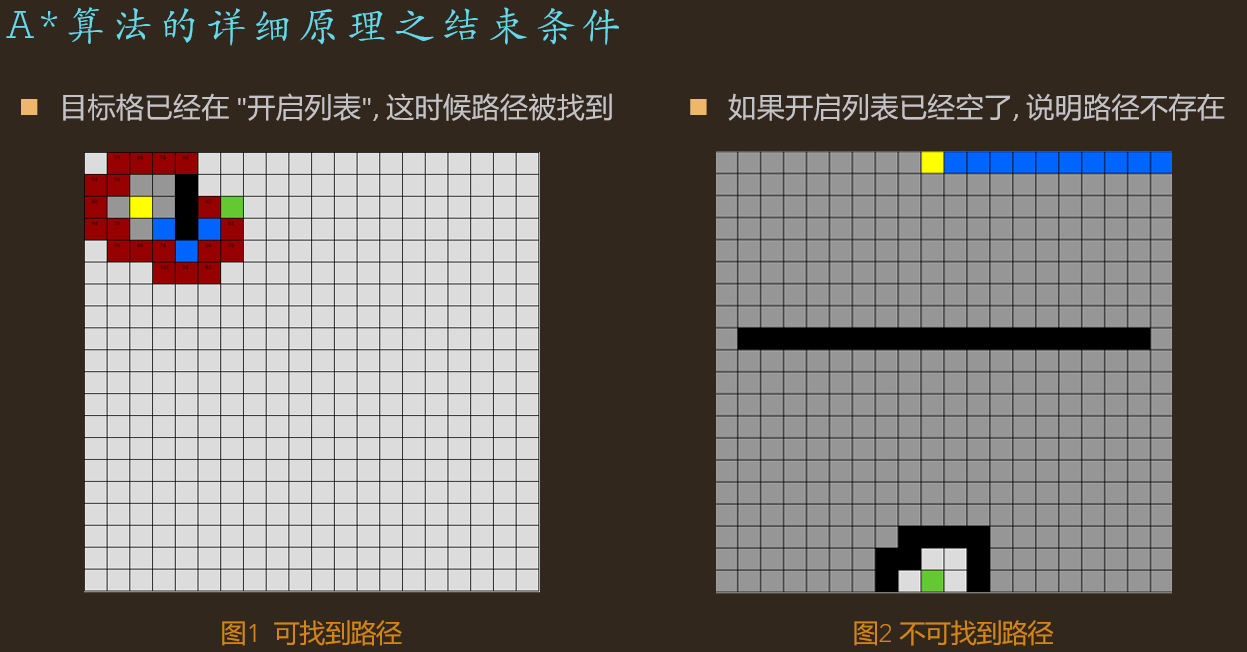
//存在路径:目标格"end_point"已经在"open_list"
//不存在路径: "open_list"==NULL,搜索了所有可能的点 A*算法的优缺点:
优点:
1) 利用启发式函数,搜索范围小,提高了搜索效率
2) 如果最优路径存在,那么一定能找到最优路径
缺点:
1) A算法不适用于动态环境
2) A算法不太适合于高维空间,计算量大
3) 目标点不可达时会造成大量性能消耗
上一篇:类和对象(下)(二)
相关内容
热门资讯
Linux-scheduler...
四、调度域 SDTL结构 linux内核使用SDTL结构体来组织CPU的层次关系 struct sc...
leetcode - 2379...
Description You are given a 0-indexed string block...
Retinanet网络与foc...
参考代码:https://github.com/yhenon/pytorch-reti...